苹果为AR SLAM提出实时视觉惯性测距VIO系统解决方案

查看引用和消息源请点击:patentlyapple
所述的实时视觉惯性测距系统可用于增强现实
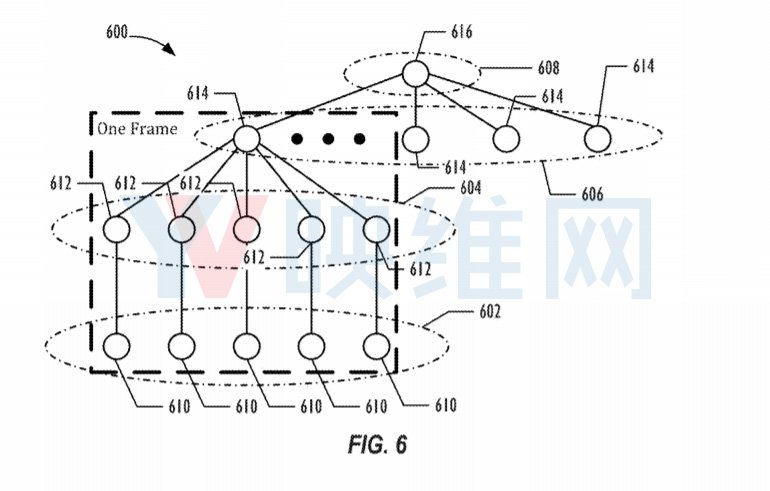
(映维网 2019年05月31日)日前美国专利商标局公布了一批全新的苹果专利申请,其中一项发明利用了机器学习计算系统来映射和追踪位置信息。具体来说,苹果主要描述了一种用于监控视觉惯性测距(Visual Inertial Odometry;VIO)系统运作状况的机器学习系统,如即时定位与地图构建(SLAM)系统。
计算机视觉方法通常是根据对真实环境图像的分析来理解现实世界情景,然后形成相应的决策。特别地,SLAM技术涉及自动确定设备相对于真实环境的位置和/或方向,并创建真实环境的缩放几何模型,无需预先理解环境。
真实环境的缩放几何模型的创建可以称为环境的重建。苹果指出:“SLAM技术涉及一系列的应用,如用于机器人系统或移动系统的导航,3D重建,以及在未知的现实环境中支持增强现实应用等等”。
......(全文 749 字,剩余 441 字)
注册用户请登入后阅读完整文章
映维会员、PICO员工可联系映维免费获取权限