微软专利分享HoloLens 2立体图像深度信息的“孔径、遮挡”解决方案

密集深度计算
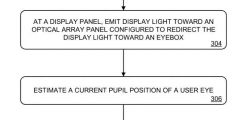
(映维网Nweon 2024年07月19日)用于校正视差问题的一种方法涉及执行从立体摄像头视角到用户眼睛视角的摄像头重投影。这需要执行校准步骤以确定立体摄像头和用户眼睛之间的物理定位差异。然后,在使用立体摄像头捕获立体图像对之后,执行基于立体图像对计算深度信息(例如深度映射)的步骤(例如,通过执行立体匹配)。随后,系统可以重新投影计算出的深度信息以对应于用户的左眼和右眼的透视图。
然而,基于立体图像对计算深度信息存在众多挑战。例如,对立体图像对执行立体匹配以生成深度信息涉及识别立体图像对的特定像素之间的差异。视差值包括一个图像中的像素与另一个图像中代表环境中公共3D点的对应像素之间的像素坐标差。
立体匹配算法可以识别以环境水平结构的像素为中心的第一图像中的像素块,并且可以确定第二图像中沿着相同扫描线和相同水平结构的多个像素块对应于第一图像的像素块。所以,立体匹配算法可能无法准确识别表示环境中相同3D点的不同图像中的像素对,特别是对于与扫描方向对齐的环境中的结构。这个问题通常被称为“孔径问题”。
除了孔径问题外,基于立体图像对计算深度信息存在其他挑战。例如,一对立体摄影头中只有一个捕获环境中的特定3D点。在一个示例中,对于靠近立体摄像头对的对象,一个摄像头可以捕获对象的一部分,而对象的一部分可以被另一个摄像头的视场遮挡。这个问题通常被称为“遮挡问题”。
......(全文 3709 字,剩余 3166 字)
注册用户请登入后阅读完整文章
映维会员、PICO员工、大朋员工可联系映维免费获取权限