微软专利提出一个为MR远程渲染优化深度缓冲的方法

优化远程渲染的深度缓冲
(映维网Nweon 2024年07月19日)MR头显通常包括具有一个或多个追踪摄像头和惯性测量单元(IMU)的定位系统。利用所述传感器,系统可以确定设备相对于周围环境的位置和姿态。来自IMU的数据可用于补充摄像头数据,从而提供更可靠的位置和姿态确定。
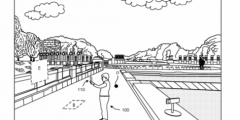
在MR场景中进行数字内容的视觉放置或渲染全息图时,头显的位置和姿态都需要由MR系统提供。例如当用户在空间中走动时,MR可以通过SLAM技术计算和确定用户的位置,并可以为MR场景中的虚拟内容提供即时显示校正。
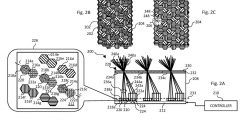
在特定情况下,MR系统可以选择执行远程渲染。其中,全息图最初在远程系统生成或制备,然后通过网络传输到头显。这种类型的远程渲染十分有用,因为它可以帮助减少头显本地执行的处理量,从而提高续航并优化形状参数。
但在远程服务生成图像和头显显示图像之间通常存在时间延迟。例如,如果远程服务基于确定的或预期的姿态生成全息图,然后当全息图显示时,头显已经发生移动,亦即不在所述姿态的位置。这时,头显将需要执行一定的重投影以纠正全息图的姿态,促使其对应于头显的当前真实位置。
......(全文 1612 字,剩余 1189 字)
注册用户请登入后阅读完整文章
映维会员、PICO员工可联系映维免费获取权限