微软AR/VR专利介绍视觉里程计改进全息图的环境姿态理解

帮助执行鲁棒深度计算和由此产生的姿态估计
(映维网Nweon 2024年08月06日)全息图可以分为视场锁定全息图或世界锁定全息图。世界锁定全息图意味着锚定到现实世界。无论用户的移动如何,世界全息图都与现实世界锚定在一起。
相比之下,对于视场锁定全息图,无论用户视场发生任何移动,它都会持续显示在用户视场的特定位置。例如,视场锁定全息图可以持续显示在用户视场的右上角。
为了正确显示世界锁定全息图,MR系统需要获得对环境的空间理解以及相对于环境的姿态。显然,这就要求改进MR系统姿态的确定或估计方式。
在日前由美国专利商标局公布的一份专利申请中,微软就介绍了一种相关的视觉里程计。
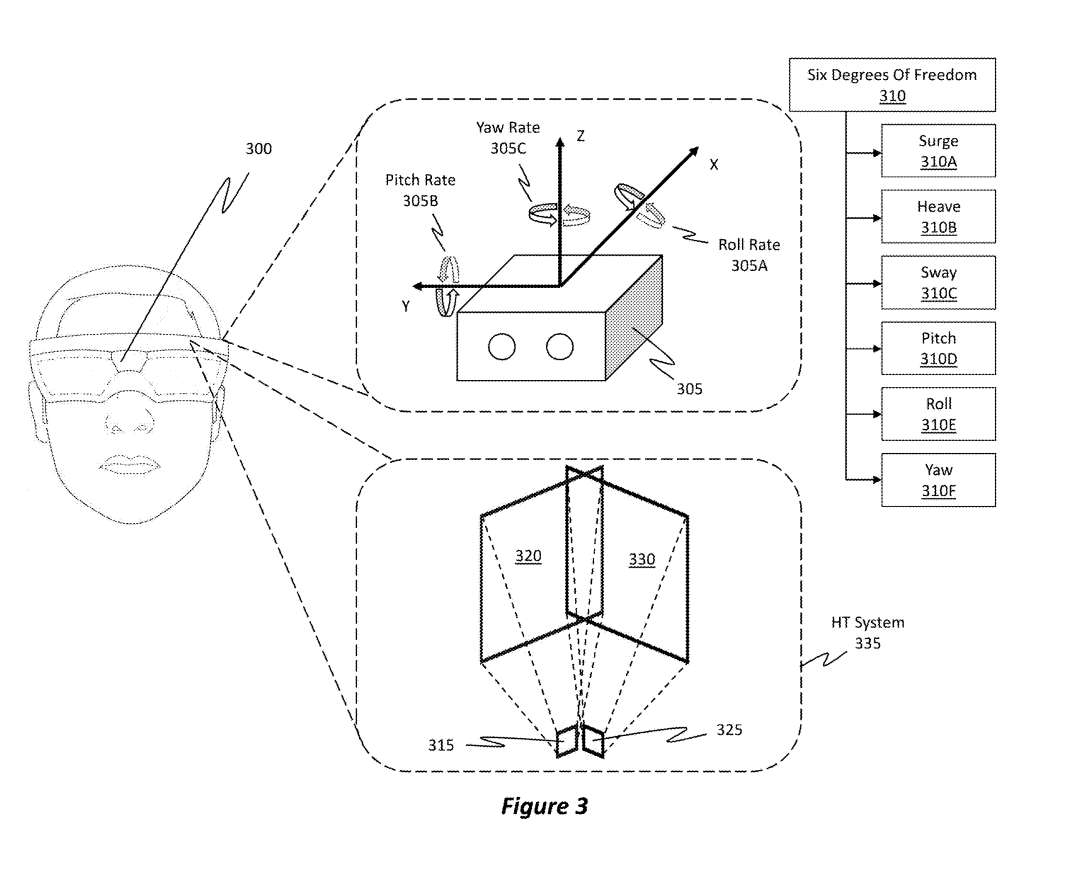
图3示出了第一摄像头315及其相应的视场320的可观测区域,以及第二摄像头325及其相应的FOV 330。
头显300能够利用IMU 305产生的显示定位信息和摄像头系统335产生的显示定位信息来确定头显300的位置和姿态。位置和姿态信息将允许头显300能够在MR场景中准确渲染全息图。
最先进的追踪是通过高效准确的视觉惯性里程计VIO模块实现。通常,VIO模块从IMU获取带有时间戳的图像和数据作为输入。系统使用图像、现有的3D点和关于设备状态的知识来计算对应于3D世界点的2D特征观测值。
......(全文 4905 字,剩余 4450 字)
注册用户请登入后阅读完整文章
映维会员、PICO员工可联系映维免费获取权限